


Inspired by Cornell's new, innovative robotic gripper (a sort of shape-shifting balloon hand), Steve Norris of Norris Labs decided to go DIY and make his own home-brewed replica at a lower cost.

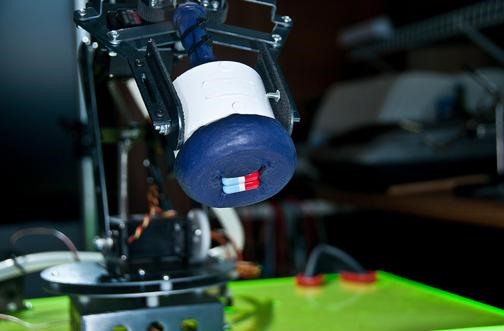
"I constructed my own version of the Cornell University Universal Gripper using parts that I had lying around my lab. This includes the CrustCrawler SG6-UT Robotic Arm, a Yost Engineering ServoCenter controller, a Reynolds Handi-Vac, and a balloon filled with coffee grounds."
It works like this: the gripper employs a technique called "jamming", in which a balloon filled with coffee grounds acts as a malleable "hand", capable of lifting a wide variety of objects, "from a car's shock absorber to a raw egg" (read more here).

Amazing. Norris, please, make us a HowTo video.
In the gallery below: the first video shows Norris' version, the second video shows the Cornell original.
More shots of Norris' copy:


Just updated your iPhone? You'll find new emoji, enhanced security, podcast transcripts, Apple Cash virtual numbers, and other useful features. There are even new additions hidden within Safari. Find out what's new and changed on your iPhone with the iOS 17.4 update.
































Be the First to Comment
Share Your Thoughts